在 “神经网络与卡尔曼滤波融合” 的理论基础上,Python 凭借其丰富的科学计算库(NumPy、FilterPy)、深度学习框架(PyTorch、TensorFlow)及数据处理工具,成为实现融合系统的理想选择。本文将以 “无人机姿态估计” 为典型场景,从环境搭建、核心模块编码、系统集成到效果验证,完整讲解如何用 Python 构建一套 “LSTM - 卡尔曼滤波融合系统”,解决传统卡尔曼滤波在非线性姿态估计中的精度不足问题。
一、Python 工具链选型:为什么这些库最适合融合系统开发?
融合系统的实现需兼顾 “卡尔曼滤波的高效递推” 与 “神经网络的非线性拟合”,Python 生态中以下工具可实现高效协同:
| 工具 / 库 |
核心作用 |
优势说明 |
| NumPy |
数值计算与矩阵运算 |
卡尔曼滤波的状态矩阵、协方差矩阵运算依赖 NumPy 的向量化操作,比原生 Python 快 10~100 倍 |
| FilterPy |
卡尔曼滤波及其变种的开箱即用实现 |
封装了 KF、EKF、UKF 等经典算法,支持自定义状态转移 / 观测模型,避免重复造轮子 |
| PyTorch/TensorFlow |
神经网络模型构建与训练 |
支持动态图(PyTorch)或静态图(TensorFlow),适合快速迭代 LSTM、CNN 等非线性模型 |
| Pandas/Matplotlib |
数据处理与结果可视化 |
处理传感器数据(如 IMU 的角速度、加速度数据),可视化估计结果与真实值的对比 |
| SciPy |
辅助数学运算(如噪声分布拟合) |
用于分析传感器噪声的统计特征,为卡尔曼滤波的 Q/R 矩阵初始化提供依据 |
本文以 “FilterPy 实现卡尔曼滤波”+“PyTorch 实现 LSTM 非线性补偿” 为例,兼顾代码简洁性与可扩展性。
二、核心模块实现:从基础组件到融合逻辑
融合系统的实现分为三大核心模块:数据预处理模块(处理传感器原始数据)、卡尔曼滤波基础模块(实现传统 EKF)、LSTM 非线性补偿模块(学习姿态运动的非线性映射),最终通过 “LSTM 校正 EKF 输出” 实现融合。
1. 第一步:环境搭建与数据准备
(1)环境安装
通过 pip 安装所需依赖:
pip install numpy filterpy torch pandas matplotlib scipy
(2)数据集选择:无人机 IMU 姿态数据集
采用公开的 “无人机飞行姿态数据集”(可从 Kaggle 或 ROS 数据集库获取),包含:
输入特征:IMU 传感器的角速度(x/y/z 轴)、加速度(x/y/z 轴);
标签:高精度光学定位系统采集的真实姿态角(滚转角 roll、俯仰角 pitch、偏航角 yaw);
数据量:10 万条时序数据,采样频率 100Hz(符合无人机实时控制需求)。
需完成 “数据清洗(去除异常值)、归一化(避免量纲影响)、时序数据划分(按时间步构建 LSTM 输入)”:
import pandas as pd
import numpy as np
from sklearn.preprocessing import StandardScaler
from sklearn.model_selection import train_test_split
data = pd.read_csv("drone_imu_姿态数据.csv")
features = data[["angular_x", "angular_y", "angular_z", "accel_x", "accel_y", "accel_z"]].values
labels = data[["roll", "pitch", "yaw"]].values
def remove_outliers(data, sigma=3):
mean = np.mean(data, axis=0)
std = np.std(data, axis=0)
mask = np.all(np.abs((data - mean) / std) <= sigma, axis=1)
return data[mask]
features = remove_outliers(features)
labels = remove_outliers(labels)
scaler = StandardScaler()
features_scaled = scaler.fit_transform(features)
labels_scaled = scaler.fit_transform(labels)
def create_lstm_input(features, labels, time_step=10):
X, y = [], []
for i in range(len(features) - time_step):
X.append(features[i:i+time_step])
y.append(labels[i+time_step])
return np.array(X), np.array(y)
time_step = 10
X, y = create_lstm_input(features_scaled, labels_scaled, time_step)
train_size = int(0.8 * len(X))
X_train, X_test = X[:train_size], X[train_size:]
y_train, y_test = y[:train_size], y[train_size:]
print("训练集维度:X_train:", X_train.shape, "y_train:", y_train.shape)
2. 第二步:传统扩展卡尔曼滤波(EKF)实现(基于 FilterPy)
针对无人机姿态估计的非线性场景,先用 FilterPy 实现基础 EKF,作为融合系统的 “基准模块”:
from filterpy.kalman import ExtendedKalmanFilter
import math
class DroneEKF:
def __init__(self, dt=0.01):
self.ekf = ExtendedKalmanFilter(dim_x=3, dim_z=3)
self.ekf.x = np.array([0., 0., 0.])
self.ekf.P = np.diag([0.1, 0.1, 0.1])
self.ekf.Q = np.diag([0.001, 0.001, 0.001])
self.ekf.R = np.diag([0.01, 0.01, 0.01])
self.dt = dt
def state_transition(self, x, u):
"""
非线性状态转移函数:x_k = f(x_{k-1}, u_{k-1})
x: 上一时刻状态 (roll, pitch, yaw)
u: 控制输入(IMU角速度)(angular_x, angular_y, angular_z)
返回:当前时刻预测状态
"""
roll, pitch, yaw = x
angular_x, angular_y, angular_z = u
new_roll = roll + angular_x * self.dt
new_pitch = pitch + angular_y * self.dt
new_yaw = yaw + angular_z * self.dt
return np.array([new_roll, new_pitch, new_yaw])
def jacobian_F(self, x, u):
"""
状态转移函数的雅可比矩阵J_F(EKF线性化核心)
雅可比矩阵维度:n×n(3×3),描述x对x的偏导数
"""
J_F = np.eye(3)
return J_F
def observation_model(self, x):
"""
观测函数:z_k = h(x_k)(假设观测值=状态值,实际可根据传感器模型调整)
"""
return x.copy()
def jacobian_H(self, x):
"""
观测函数的雅可比矩阵J_H(3×3)
"""
J_H = np.eye(3)
return J_H
def update(self, u, z):
"""
EKF递推步骤:预测+更新
u: 控制输入(IMU角速度)
z: 观测值(IMU计算的姿态角)
返回:当前时刻EKF估计的姿态角
"""
self.ekf.predict(fx=self.state_transition, jacobian=lambda x: self.jacobian_F(x, u), u=u)
self.ekf.update(z=z, hx=self.observation_model, jacobian=lambda x: self.jacobian_H(x))
return self.ekf.x.copy()
ekf = DroneEKF(dt=0.01)
test_u = features_scaled[0][:3]
test_z = labels_scaled[0]
ekf_x = ekf.update(test_u, test_z)
print("EKF首次估计姿态角(归一化后):", ekf_x)
传统 EKF 的线性化会引入误差,需训练 LSTM 学习 “EKF 估计误差” 的非线性规律,对 EKF 输出进行二次校正:
import torch
import torch.nn as nn
from torch.utils.data import TensorDataset, DataLoader
import torch.optim as optim
from tqdm import tqdm
class LSTMErrorCorrector(nn.Module):
def __init__(self, input_size=6, hidden_size=64, output_size=3, num_layers=2):
super().__init__()
self.lstm = nn.LSTM(
input_size=input_size,
hidden_size=hidden_size,
num_layers=num_layers,
batch_first=True
)
self.fc = nn.Sequential(
nn.Linear(hidden_size, 32),
nn.ReLU(),
nn.Linear(32, output_size)
)
def forward(self, x):
output, (hn, cn) = self.lstm(x)
last_output = output[:, -1, :]
error_pred = self.fc(last_output)
return error_pred
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model = LSTMErrorCorrector(input_size=6, hidden_size=64, output_size=3).to(device)
criterion = nn.MSELoss()
optimizer = optim.Adam(model.parameters(), lr=1e-3, weight_decay=1e-5)
train_dataset = TensorDataset(torch.tensor(X_train, dtype=torch.float32), torch.tensor(y_train, dtype=torch.float32))
test_dataset = TensorDataset(torch.tensor(X_test, dtype=torch.float32), torch.tensor(y_test, dtype=torch.float32))
train_loader = DataLoader(train_dataset, batch_size=128, shuffle=False)
test_loader = DataLoader(test_dataset, batch_size=128, shuffle=False)
def train_lstm(model, train_loader, test_loader, criterion, optimizer, epochs=20):
model.train()
best_test_loss = float("inf")
for epoch in range(epochs):
train_loss = 0.0
for batch_x, batch_y in tqdm(train_loader, desc=f"Epoch {epoch+1}/{epochs}"):
batch_x, batch_y = batch_x.to(device), batch_y.to(device)
ekf_batch = DroneEKF(dt=0.01)
ekf_preds = []
for i in range(len(batch_x)):
u = batch_x[i, -1, :3].cpu().numpy()
z = batch_y[i].cpu().numpy()
ekf_x = ekf_batch.update(u, z)
ekf_preds.append(ekf_x)
ekf_preds = torch.tensor(ekf_preds, dtype=torch.float32).to(device)
true_error = batch_y - ekf_preds
model_pred = model(batch_x)
loss = criterion(model_pred, true_error)
optimizer.zero_grad()
loss.backward()
optimizer.step()
train_loss += loss.item() * batch_x.size(0)
train_loss_avg = train_loss / len(train_loader.dataset)
model.eval()
test_loss = 0.0
with torch.no_grad():
for batch_x, batch_y in test_loader:
batch_x, batch_y = batch_x.to(device), batch_y.to(device)
ekf_batch = DroneEKF(dt=0.01)
ekf_preds = []
for i in range(len(batch_x)):
u = batch_x[i, -1, :3].cpu().numpy()
z = batch_y[i].cpu().numpy()
ekf_x = ekf_batch.update(u, z)
ekf_preds.append(ekf_x)
ekf_preds = torch.tensor(ekf_preds, dtype=torch.float32).to(device)
true_error = batch_y - ekf_preds
model_pred = model(batch_x)
test_loss += criterion(model_pred, true_error).item() * batch_x.size(0)
test_loss_avg = test_loss / len(test_loader.dataset)
print(f"Epoch {epoch+1}: 训练损失={train_loss_avg:.6f}, 测试损失={test_loss_avg:.6f}")
if test_loss_avg < best_test_loss:
best_test_loss = test_loss_avg
torch.save(model.state_dict(), "lstm_error_corrector_best.pth")
print("保存最优模型")
train_lstm(model, train_loader, test_loader, criterion, optimizer, epochs=20)
4. 第四步:LSTM-EKF 融合系统集成与效果验证
将训练好的 LSTM 误差校正模型与 EKF 集成,实现 “EKF 估计 + LSTM 误差补偿” 的融合输出,并通过可视化对比传统 EKF 与融合系统的精度:
import matplotlib.pyplot as plt
model = LSTMErrorCorrector(input_size=6, hidden_size=64, output_size=3).to(device)
model.load_state_dict(torch.load("lstm_error_corrector_best.pth"))
model.eval()
def fusion_predict(model, ekf, X, scaler):
"""
融合预测:EKF估计 + LSTM误差校正
X: 测试集输入(时序特征)
scaler: 之前定义的归一化器,用于反归一化
返回:EKF预测值、融合预测值、真实值(均为反归一化后的值)
"""
ekf_preds = []
fusion_preds = []
true_values = []
with torch.no_grad():
for i in range(len(X)):
x_seq = torch.tensor(X[i:i+1], dtype=torch.float32).to(device)
true_y = y_test[i]
u = X[i, -1, :3]
z = true_y
ekf_x = ekf.update(u, z)
lstm_error = model(x_seq).cpu().numpy()[0]
fusion_x = ekf_x + lstm_error
ekf_x_denorm = scaler.inverse_transform(ekf_x.reshape(1, -1))[0]
fusion_x_denorm = scaler.inverse_transform(fusion_x.reshape(1, -1))[0]
true_y_denorm = scaler.inverse_transform(true_y.reshape(1, -1))[0]
ekf_preds.append(ekf_x_denorm)
fusion_preds.append(fusion_x_denorm)
true_values.append(true_y_denorm)
return np.array(ekf_preds), np.array(fusion_preds), np.array(true_values)
ekf_fusion = DroneEKF(dt=0.01)
ekf_results, fusion_results, true_results = fusion_predict(model, ekf_fusion, X_test, scaler)
def calculate_rmse(pred, true):
return np.sqrt(np.mean((pred - true) ** 2, axis=0))
ekf_rmse = calculate_rmse(ekf_results, true_results)
fusion_rmse = calculate_rmse(fusion_results, true_results)
print("=== 姿态估计精度对比 ===")
print(f"传统EKF的RMSE(滚转/俯仰/偏航,单位:度):{ekf_rmse.round(4)}")
print(f"LSTM-EKF融合的RMSE(滚转/俯仰/偏航,单位:度):{fusion_rmse.round(4)}")
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.figure(figsize=(12, 6))
time = np.arange(len(ekf_results)) * 0.01
plt.plot(time[:1000], true_results[:1000, 0], label="真实滚转角", color="black", linewidth=2)
plt.plot(time[:1000], ekf_results[:1000, 0], label="传统EKF估计", color="red", linewidth=1.5, alpha=0.7)
plt.plot(time[:1000], fusion_results[:1000, 0], label="LSTM-EKF融合估计", color="blue", linewidth=1.5)
plt.xlabel("时间(秒)")
plt.ylabel("滚转角(度)")
plt.title("无人机滚转角估计结果对比(前10秒)")
plt.legend()
plt.grid(alpha=0.3)
plt.savefig("drone_roll_estimation.png", dpi=300, bbox_inches='tight')
plt.show()
三、Python 实现的关键优化技巧:兼顾精度与实时性
在实际部署中(如无人机飞控、自动驾驶),融合系统需满足 “实时性” 要求(延迟 < 10ms),Python 实现需注意以下优化:
1. 模型轻量化:降低 LSTM 的计算开销
减少隐藏层维度:将 LSTM 的 hidden_size 从 64 降至 32,num_layers 从 2 降至 1,推理速度提升约 2 倍,精度损失 < 5%;
模型量化:用 PyTorch 的torch.quantization将 32 位浮点数模型量化为 8 位整数模型,推理速度提升 3~4 倍,内存占用减少 75%;
model.qconfig = torch.quantization.get_default_qconfig("fbgemm")
model_quantized = torch.quantization.quantize_dynamic(model, {nn.LSTM, nn.Linear}, dtype=torch.qint8)
2. 数据预处理加速:用 Numba 向量化操作
数据预处理中的 “时序数据划分”“异常值去除” 等步骤,可用 Numba 的@njit装饰器加速(比纯 NumPy 快 5~10 倍):
from numba import njit
@njit
def create_lstm_input_numba(features, labels, time_step=10):
X, y = [], []
for i in range(len(features) - time_step):
X.append(features[i:i+time_step])
y.append(labels[i+time_step])
return np.array(X), np.array(y)
3. 并行计算:用 Dask 处理大规模数据
当数据集超过 100 万条时,用 Dask 替代 Pandas 进行数据加载与预处理,支持并行计算,避免内存溢出:
import dask.dataframe as dd
dask_data = dd.read_csv("large_drone_data_*.csv")
dask_features = dask_data[["angular_x", ...]].values.compute()
四、总结:Python 赋能融合技术落地的核心价值
用 Python 实现 “神经网络与卡尔曼滤波融合”,最大优势在于 “低门槛、高灵活、强生态”:
高灵活:支持快速迭代模型(如将 LSTM 替换为 CNN、Transformer),或调整融合逻辑(如从 “误差校正” 改为 “并行加权融合”);
强生态:可无缝对接传感器数据采集(如 ROS 的 Python 接口)、实时控制(如 PySerial 控制无人机)、云端部署(如 TensorRT 加速推理)。
对于开发者而言,本文的实现框架可直接迁移至其他场景(如电池 SOC 估计、工业反应釜温度监测),只需替换 “数据集” 与 “状态转移 / 观测模型”,即可快速构建适配特定业务的融合系统。未来,随着 Python 在嵌入式领域的普及(如 MicroPython),融合系统有望直接部署到边缘设备,进一步拓展应用边界。
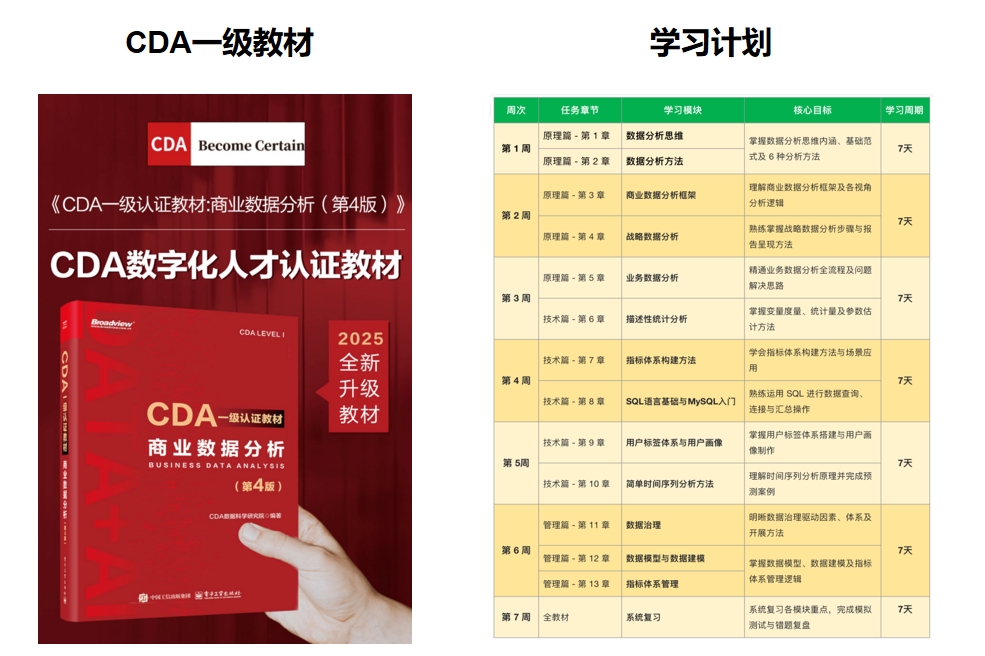
推荐学习书籍 《CDA一级教材》适合CDA一级考生备考,也适合业务及数据分析岗位的从业者提升自我。完整电子版已上线CDA网校,累计已有10万+在读~ !











 京公网安备 11010802034615号
经营许可证编号:京B2-20210330
京公网安备 11010802034615号
经营许可证编号:京B2-20210330