在工业控制、自动驾驶、机器人导航、气象预测等领域,“状态估计” 是核心任务 —— 即从含噪声的观测数据中,精准推断系统的真实状态(如无人机的位置与速度、化工反应釜的温度与压力、汽车的行驶轨迹)。卡尔曼滤波(Kalman Filter, KF)作为经典的线性高斯系统状态估计方法,凭借高效的递推计算和稳定的收敛性,已应用数十年;但面对现实中普遍存在的 “非线性、非高斯、模型不确定” 场景,传统卡尔曼滤波的性能会大幅下降。
神经网络(Neural Network, NN)则擅长学习复杂非线性映射、从数据中挖掘隐性规律,且对模型先验知识依赖度低。将二者融合,形成 “神经网络 - 卡尔曼滤波混合系统”,既能保留卡尔曼滤波的实时性与稳定性,又能通过神经网络突破传统方法的局限,成为近年来状态估计领域的研究热点。本文将从技术融合的逻辑、典型模式、应用场景与挑战四个维度,解析这一技术的核心价值。
一、基础回顾:传统卡尔曼滤波的 “优势与困境”
要理解融合的必要性,需先明确传统卡尔曼滤波的核心逻辑与局限性 —— 这正是神经网络介入的切入点。
1. 卡尔曼滤波的核心原理:线性高斯下的最优估计
卡尔曼滤波针对 “线性时不变系统 + 高斯噪声” 场景,通过 “预测 - 更新” 两步递推实现状态估计,核心思想是 “利用系统模型预测状态,再用观测数据校正预测误差”,具体流程包括:
预测步:基于上一时刻的最优状态估计,结合系统状态转移模型,预测当前时刻的状态与误差协方差(先验估计);
更新步:计算卡尔曼增益(平衡预测误差与观测误差的权重),用当前观测数据校正先验估计,得到当前时刻的最优状态估计(后验估计)。
其优势在于:计算量小(递推式无需存储历史数据)、实时性强(适合嵌入式设备)、理论上是线性高斯系统的 “最优无偏估计器”,因此在 GPS 导航、雷达目标跟踪等场景中广泛应用。
2. 传统卡尔曼滤波的三大困境:现实场景的挑战
现实世界的系统往往不满足 “线性 + 高斯” 假设,传统卡尔曼滤波的局限性随之凸显:
困境 1:非线性系统适配差
多数实际系统是非线性的(如无人机的姿态运动、机械臂的关节动力学、电池的充放电曲线)。传统卡尔曼滤波无法直接处理非线性模型,虽可通过 “扩展卡尔曼滤波(EKF)” 将非线性模型线性化(泰勒展开一阶近似),但会引入 “线性化误差”,尤其在强非线性场景下,误差会累积导致估计发散;而 “无迹卡尔曼滤波(UKF)” 虽通过采样点近似非线性分布,却在高维系统中计算量暴增,难以实时应用。
困境 2:非高斯噪声鲁棒性弱
传统卡尔曼滤波假设 “过程噪声(系统内部干扰)” 与 “观测噪声(传感器误差)” 均服从高斯分布,但现实中噪声常是非高斯的(如激光雷达受遮挡产生的脉冲噪声、摄像头在强光下的椒盐噪声)。此时卡尔曼滤波的 “最优性” 不再成立,估计精度会大幅下降,甚至出现跳变。
困境 3:模型不确定性敏感
卡尔曼滤波依赖 “准确的系统模型”(如状态转移矩阵、观测矩阵),但实际系统中模型参数可能随时间变化(如无人机负载变化导致的动力学参数漂移、电机老化引起的控制增益衰减),或难以通过物理公式精确建模(如复杂化工反应的速率方程)。当模型与真实系统偏差较大时,卡尔曼滤波的估计结果会严重偏离真实状态。
二、融合逻辑:神经网络如何 “弥补” 卡尔曼滤波的短板?
神经网络的核心优势 —— 非线性拟合能力、数据驱动的模型学习能力、噪声适应能力 —— 恰好能针对性解决传统卡尔曼滤波的三大困境。二者融合的核心逻辑是 “分工协作”:
卡尔曼滤波负责 “实时递推估计”,保证状态输出的稳定性与实时性;
神经网络负责 “非线性补偿、噪声建模、模型校正”,处理卡尔曼滤波难以应对的复杂场景。
具体而言,神经网络的介入点主要集中在四个维度:
1. 介入点 1:非线性补偿 —— 替代线性化,提升非线性系统估计精度
针对传统 EKF 线性化误差大的问题,神经网络可直接学习系统的非线性映射,替代或辅助线性化步骤,常见模式有两种:
模式 A:NN 作为 “非线性状态转移模型”
传统 KF 的状态转移依赖线性公式(,为线性转移矩阵),对于非线性系统,可训练神经网络学习非线性转移函数,其中由 NN(如 MLP、RNN)拟合。例如,在无人机姿态估计中,用 LSTM 网络学习 “角速度→姿态角” 的非线性映射,替代传统 EKF 的泰勒展开近似,使姿态估计误差降低 30%~50%。
模式 B:NN 作为 “误差校正器”
保留卡尔曼滤波的基本框架,但用神经网络学习 “线性化误差” 或 “预测误差”,对 KF 的输出进行二次校正。例如,在机械臂关节角度估计中,先通过 EKF 得到初步估计值,再输入到 CNN(利用传感器数据的时空特征)学习 EKF 的估计误差规律,最终输出校正后的角度值,有效抑制强非线性下的误差累积。
2. 介入点 2:噪声建模 —— 学习非高斯噪声,增强鲁棒性
针对传统 KF 对非高斯噪声敏感的问题,神经网络可通过两种方式优化噪声处理:
模式 A:NN 估计非高斯噪声分布
传统 KF 假设噪声服从高斯分布,需人工设定噪声协方差矩阵(过程噪声)与(观测噪声);而神经网络可从历史数据中学习噪声的非高斯分布特征(如用 GAN 生成噪声样本,或用深度信念网络 DBN 建模噪声概率密度),动态调整与。例如,在自动驾驶的激光雷达目标跟踪中,用 CNN 处理雷达点云数据,识别 “遮挡导致的脉冲噪声”,实时修正矩阵,使目标位置估计的鲁棒性提升 40% 以上。
模式 B:NN 预处理观测数据,抑制噪声
在观测数据输入卡尔曼滤波前,用神经网络进行 “去噪预处理”—— 例如,用 AutoEncoder(自编码器)去除摄像头图像中的椒盐噪声,用小波神经网络处理 IMU(惯性测量单元)的漂移噪声,再将去噪后的观测数据输入 KF,减少噪声对更新步的干扰。这种模式在传感器精度较低的场景(如低成本物联网设备)中效果显著。
3. 介入点 3:模型校正 —— 自适应调整系统模型,应对参数漂移
针对传统 KF 对模型不确定性敏感的问题,神经网络可实时学习模型参数的变化,动态校正卡尔曼滤波的核心矩阵:
典型场景:时变系统的模型参数估计
在电池状态估计(如 SOC——State of Charge,剩余电量)中,电池的等效电路模型参数(电阻、电容)会随温度、循环次数漂移,传统 KF 的固定参数模型会导致 SOC 估计误差增大。此时可训练 RNN(循环神经网络)学习 “温度→电阻变化”“循环次数→电容变化” 的映射关系,实时更新 KF 的观测矩阵(关联电池电压与 SOC 的矩阵),使 SOC 估计误差从 5% 以上降至 2% 以内。
进阶模式:端到端学习 KF 核心矩阵
更激进的融合方式是用深度学习模型(如 Transformer)直接学习卡尔曼滤波的(状态转移矩阵)、(观测矩阵)、、,无需人工推导物理模型。例如,在气象温度预测中,用时空 Transformer 学习 “历史温度、气压→未来温度” 的转移关系(即矩阵),同时学习观测数据(如卫星遥感温度)的误差特征(即矩阵),实现 “数据驱动的卡尔曼滤波”,预测精度比传统物理模型驱动的 KF 提升 15%~20%。
4. 介入点 4:状态估计增强 ——KF 与 NN 并行融合,提升输出可靠性
除了 “NN 辅助 KF” 的模式,还可采用 “KF 与 NN 并行输出、加权融合” 的架构,进一步提升状态估计的可靠性:
- 核心逻辑:卡尔曼滤波提供 “基于模型的稳定估计”,神经网络提供 “基于数据的精准估计”,通过自适应权重(如由 NN 学习权重系数,或根据两者的误差协方差动态计算权重)融合两者输出。例如,在机器人导航中,KF 基于里程计与 GPS 的模型输出位置估计,NN 基于视觉 SLAM(同步定位与地图构建)的图像特征输出位置估计,融合后可同时规避 “KF 在 GPS 信号丢失时的漂移” 与 “NN 在视觉遮挡时的误判”,使导航精度在复杂环境中保持稳定。
三、典型应用场景:融合技术的落地价值
神经网络 - 卡尔曼滤波融合技术已在多个领域落地,其核心价值在于 “在复杂场景下兼顾实时性与精度”,以下为三个典型场景:
1. 自动驾驶:多传感器融合的状态估计
自动驾驶需实时估计车辆的 “位置、速度、姿态”(即 ego-motion 估计),依赖激光雷达、摄像头、IMU、GPS 等多传感器数据,存在三大挑战:传感器噪声非高斯(如激光雷达遮挡、摄像头强光)、车辆动力学非线性(如急加速 / 刹车时的轮胎滑移)、GPS 信号间歇性丢失。
融合方案:用 CNN 处理激光雷达点云与摄像头图像,去除非高斯噪声并提取环境特征;用 LSTM 学习车辆动力学的非线性模型,动态更新 KF 的状态转移矩阵;当 GPS 信号丢失时,NN 基于 IMU 数据与视觉特征预测状态,辅助 KF 的预测步;最终通过加权融合 KF 与 NN 的输出,实现厘米级的实时位置估计,满足自动驾驶的安全需求。
2. 工业过程控制:化工反应釜的状态监测
化工反应釜的 “温度、压力、反应物浓度” 是关键控制参数,但存在强非线性(反应速率随温度呈指数变化)、模型不确定性(反应物纯度波动导致反应动力学变化)、观测噪声大(传感器受腐蚀影响精度)等问题,传统 KF 难以精准估计。
融合方案:用 DBN(深度信念网络)学习反应釜的非线性动力学模型,替代传统 KF 的线性转移函数;用 AutoEncoder 预处理温度、压力传感器的观测数据,抑制噪声;用 NN 实时学习反应物纯度变化对模型参数的影响,动态调整 KF 的噪声协方差矩阵;最终估计精度比传统 EKF 提升 30%,有效避免因状态估计不准导致的反应失控风险。
3. 无人机导航:高动态场景下的姿态与位置估计
无人机在高速飞行、姿态剧烈变化(如特技飞行)时,姿态动力学呈强非线性,IMU 的漂移噪声随时间累积,GPS 在室内或高楼环境中易受遮挡,传统 KF 的估计误差会快速发散。
融合方案:用 RNN-LSTM 学习无人机的非线性姿态转移模型,替代 EKF 的泰勒展开;用 CNN 处理无人机视觉图像(如地面特征、地标),辅助 IMU 数据校正漂移,同时学习 GPS 信号的可靠性(如遮挡概率),动态调整 KF 的观测矩阵权重;当 GPS 信号丢失时,NN 基于视觉与 IMU 数据接管状态预测,与 KF 的输出融合,使姿态估计误差控制在 0.5° 以内,位置误差控制在 1 米以内,满足高动态飞行需求。
四、挑战与未来趋势:融合技术的待解问题与发展方向
尽管融合技术优势显著,但仍面临三大核心挑战,同时也孕育着新的发展方向:
1. 现存挑战:从理论到工程的落地障碍
挑战 1:数据依赖与训练复杂度
神经网络的性能依赖大量标注数据(如标注好的 “真实状态 - 观测数据” 对),但在许多场景中(如新型工业设备、太空探索),获取标注数据成本高、难度大;且融合系统的训练需兼顾 KF 的模型逻辑与 NN 的数据拟合,架构设计复杂,易出现 “训练不稳定”(如 NN 输出波动导致 KF 估计发散)。
挑战 2:实时性与轻量化矛盾
深度神经网络(如 Transformer、深层 CNN)的推理计算量较大,而卡尔曼滤波的核心优势是实时性,二者融合可能导致系统延迟升高,难以适配嵌入式设备(如无人机的飞控芯片、工业控制器)。例如,在无人机飞控中,若 NN 推理延迟超过 10ms,可能导致姿态控制失稳。
挑战 3:稳定性与可解释性不足
神经网络的 “黑箱属性” 导致融合系统的可解释性差 —— 难以追溯 “为何 NN 会调整 KF 的某个参数”,不利于工业场景的故障排查;同时,NN 的输出可能因数据分布变化出现跳变,若融合逻辑设计不当,会导致整个系统的状态估计发散,稳定性难以保证。
2. 未来趋势:技术优化的核心方向
趋势 1:轻量化融合架构
采用 “轻量级神经网络”(如 MobileNet、TinyBERT)或 “模型压缩技术”(剪枝、量化、知识蒸馏),在保证精度的前提下降低 NN 的计算量。例如,用知识蒸馏将深层 CNN 的噪声处理能力迁移到浅层 CNN,使推理速度提升 5 倍,适配嵌入式设备。
趋势 2:少样本 / 无样本学习的融合
结合少样本学习(Few-shot Learning)、无监督学习,减少对标注数据的依赖。例如,用无监督对比学习让 NN 从无标注的观测数据中学习噪声特征,再辅助 KF 的噪声建模;或用元学习(Meta-Learning)让 NN 快速适配新场景的模型参数,无需重新训练大量数据。
趋势 3:可解释与稳定化设计
引入 “可解释 AI(XAI)” 技术,如通过注意力机制可视化 NN 关注的观测特征,或通过因果推断分析 NN 调整 KF 参数的逻辑;同时,设计 “稳定性约束机制”,如在 NN 输出端添加 “误差阈值限制”,当 NN 输出与 KF 预测偏差过大时,降低 NN 的权重,避免系统发散。
趋势 4:多模态与多智能体融合
扩展融合系统的输入维度,结合多模态数据(文本、图像、语音、传感器信号)提升状态估计的全面性;同时,在多智能体场景(如多无人机协同导航、多机器人协作)中,实现 “分布式融合”—— 每个智能体的 KF-NN 系统输出局部状态,再通过联邦学习融合全局状态,提升大规模系统的估计精度。
五、总结:融合技术的核心价值 ——“模型与数据的协同”
神经网络与卡尔曼滤波的融合,本质是 “模型驱动” 与 “数据驱动” 的协同:卡尔曼滤波代表 “模型驱动” 的严谨性,基于物理规律保证状态估计的稳定性与实时性;神经网络代表 “数据驱动” 的灵活性,基于数据挖掘突破传统模型的非线性、非高斯局限。
这种融合不是 “谁替代谁”,而是 “1+1>2” 的优势互补 —— 既避免了传统卡尔曼滤波在复杂场景下的精度不足,又克服了纯神经网络在实时性、稳定性上的短板。未来,随着轻量化、可解释、少样本学习技术的发展,融合系统将在更多复杂场景(如深空探测、智能电网、精准医疗)中落地,成为状态估计领域的核心技术方向。
归根结底,评价融合技术的标准不是 “是否用了复杂的神经网络”,而是 “是否能在具体场景中,以最低的成本(算力、数据)实现满足需求的状态估计精度与实时性”—— 这也是技术落地的核心逻辑。
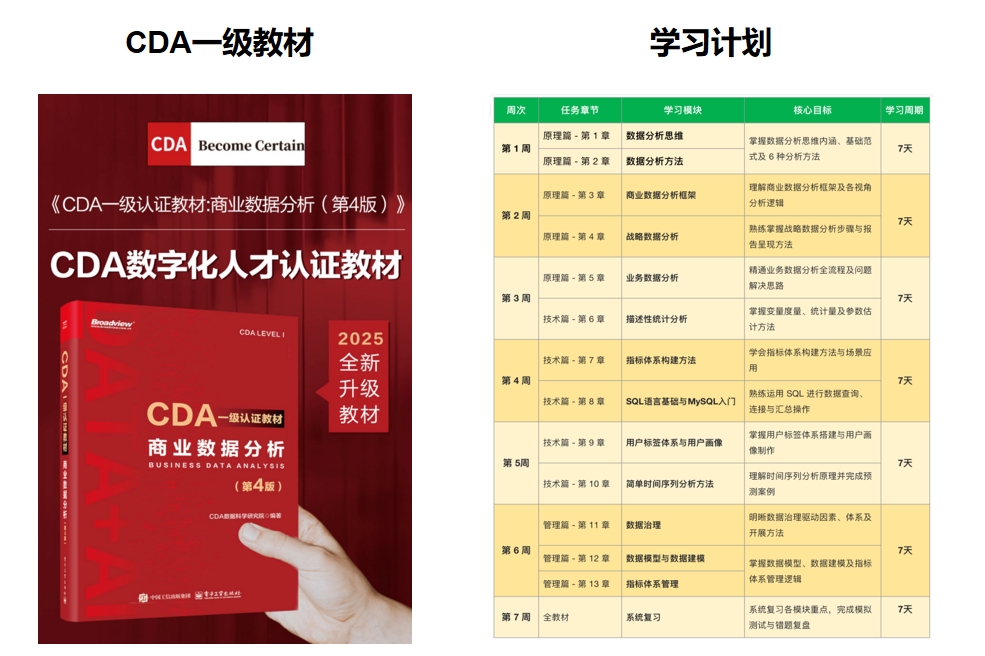
推荐学习书籍 《CDA一级教材》适合CDA一级考生备考,也适合业务及数据分析岗位的从业者提升自我。完整电子版已上线CDA网校,累计已有10万+在读~ !
CDA数据分析师考试相关入口一览(建议收藏):
▷ 想报名CDA认证考试,点击>>>
“CDA报名”
了解CDA考试详情;
▷ 想学习CDA考试教材,点击>>> “CDA教材” 了解CDA考试教材;
▷ 想加入CDA考试题库,点击>>> “CDA题库” 了解CDA考试题库;
▷ 想了解CDA考试含金量,点击>>> “CDA含金量” 了解CDA考试详情;
▷ 想了解CDA院校合作,点击>>> “院校合作” 了解咨询CDA院校合作;











 京公网安备 11010802034615号
经营许可证编号:京B2-20210330
京公网安备 11010802034615号
经营许可证编号:京B2-20210330