在 DDPM(Denoising Diffusion Probabilistic Models)训练过程中,开发者最常困惑的问题莫过于:“我的模型 loss 降到多少才算合适?” 与分类任务(如 ImageNet 分类,验证集 loss 低于 0.3 可认为效果优秀)或回归任务(如房价预测,MAE 低于 1000 元可接受)不同,DDPM 的 loss 没有统一的 “合格阈值”—— 其数值大小受数据集复杂度、模型结构、训练参数等多重因素影响,甚至 “loss 低不代表生成效果好”。
本文将从 DDPM loss 的计算原理出发,详解影响 loss 的核心因素,给出不同场景下的参考范围,提供 “loss 是否合适” 的判断方法,帮助开发者跳出 “唯数值论”,科学评估模型训练状态。
一、先懂本质:DDPM 的 loss 到底在计算什么?
要判断 DDPM loss 是否合适,首先需明确其 loss 的物理意义 —— 它与传统任务的 loss 逻辑截然不同,并非直接衡量 “生成结果与真实数据的差距”,而是衡量 “模型去噪能力的误差”。
1. DDPM loss 的核心逻辑
DDPM 的训练过程分为 “前向扩散” 与 “反向去噪” 两个阶段,loss 计算聚焦于反向去噪阶段的噪声预测误差:
前向扩散:将真实图像逐步添加高斯噪声,经过 T 个时间步后,图像变为近似纯噪声;
反向去噪:训练一个 U-Net 等 backbone 的模型,输入 “某时间步 t 的带噪图像” 与 “时间步 t 的嵌入”,预测该时间步添加的真实噪声;
loss 定义:模型预测的噪声与前向扩散中添加的真实噪声之间的均方误差(MSE),公式为:
其中, 是前向扩散添加的真实噪声, 是模型预测的噪声, 是 t 时刻的带噪图像。
2. DDPM loss 的关键特点
与生成质量的间接关联:loss 衡量的是 “噪声预测精度”,而非 “生成图像的视觉质量”—— 噪声预测准是生成好图像的基础,但不是唯一条件(还需扩散过程的概率分布匹配、采样策略优化等);
无绝对阈值:MSE loss 的数值取决于噪声的标准差(前向扩散的噪声强度)、图像分辨率、像素值范围(如 [0,1] 或 [-1,1]),不同设置下的 “合理 loss” 差异极大;
时间步的 loss 分布:训练时会对时间步 t 进行随机采样,不同 t 的 loss 不同(通常 t 较小时噪声少,loss 偏低;t 较大时噪声多,loss 偏高),最终 loss 是所有 t 的平均结果。
二、核心影响因素:为什么 DDPM 的 loss 没有统一标准?
DDPM 的 loss 数值受 5 个关键因素影响,相同模型在不同设置下的 loss 可能相差 10 倍以上,这也是 “没有统一合适值” 的根本原因。
1. 因素 1:数据集复杂度与分辨率
数据集的 “图像内容复杂度” 和 “分辨率” 直接影响噪声预测难度,进而决定 loss 范围:
分辨率影响:相同内容的图像,分辨率越高,像素数量越多,噪声预测的难度越大,loss 通常越高:
示例:CIFAR-10(32×32)的 DDPM 训练,收敛后 loss 可能在 0.01~0.03;
对比:FFHQ-64(64×64)的 DDPM 训练,收敛后 loss 可能在 0.02~0.04;FFHQ-256(256×256)则可能在 0.03~0.06。
内容复杂度影响:相同分辨率下,图像内容越复杂(如自然场景含丰富纹理、多目标),噪声预测难度越高,loss 高于简单内容(如手写数字、logo):
示例:MNIST(28×28,手写数字)收敛后 loss 约 0.008~0.015;
对比:STL-10(96×96,自然场景)收敛后 loss 约 0.02~0.035。
2. 因素 2:像素值归一化方式
DDPM 训练前会对图像像素值进行归一化,不同归一化范围的噪声 MSE 差异显著:
[0,1] 归一化:像素值映射到 [0,1] 区间,前向扩散添加的噪声标准差通常较小,loss 数值偏低;
[-1,1] 归一化:像素值映射到 [-1,1] 区间(主流设置,更适配激活函数输出),噪声的绝对数值更大,loss 通常比 [0,1] 归一化高 1~2 倍;
示例:同一 CIFAR-10 模型,[0,1] 归一化收敛 loss 约 0.01~0.02,[-1,1] 归一化则约 0.02~0.03。
3. 因素 3:扩散步数 T 与噪声调度策略
前向扩散的 “总步数 T” 和 “噪声调度表(β_t)” 决定了不同时间步的噪声强度,影响平均 loss:
T 的影响:T 越大(如 1000 vs 500),前向扩散的噪声添加更平缓,模型对每个时间步的噪声预测精度要求更高,loss 可能略高,但差异不显著(主要影响训练效率);
β_t 调度影响:β_t 是 t 时刻的噪声强度系数,若 β_t 增长过快(后期噪声强度大),则高 t 的 loss 会显著升高,拉高整体平均 loss;若 β_t 增长平缓,loss 分布更均匀,平均 loss 偏低。
4. 因素 4:模型结构与容量
用于噪声预测的 backbone(通常是 U-Net 及其变体)的复杂度,直接影响噪声预测能力:
模型容量越大,loss 越低:
基础 U-Net(无注意力、少残差块):CIFAR-10 收敛 loss 约 0.025~0.03;
U-Net + 注意力机制(如在高分辨率层加自注意力):相同数据集收敛 loss 可降至 0.015~0.025;
U-Net + 预训练权重(如用 ImageNet 预训练的 backbone):loss 可进一步降低 5%~10%。
5. 因素 5:训练参数与优化器
训练过程的超参数也会影响 loss 的收敛值和波动:
学习率:初始学习率过高(如 1e-3)会导致 loss 震荡不收敛;过低(如 1e-5)会导致收敛慢、loss 无法降至最优值;主流设置为 1e-4(Adam 优化器);
batch size:batch size 越小(如 8),loss 波动越大,收敛后的平均 loss 可能偏高;batch size 越大(如 64),梯度估计越准确,loss 更稳定且偏低;
EMA(指数移动平均):使用 EMA 更新模型参数时,EMA 模型的 loss 通常比原始模型低 5%~15%,更能反映最终生成效果的 loss 水平。
三、参考范围:不同场景下的 “合理 loss” 是多少?
虽然没有统一标准,但结合行业实践和开源项目(如 OpenAI 的 DDPM、Stable Diffusion 的基础模型),可总结出不同场景下的 “参考范围”—— 需注意,这些数值基于主流设置(T=1000,β_t 线性调度,[-1,1] 归一化,Adam 优化器,batch size≥32)。
1. 常用数据集的收敛 loss 参考
| 数据集 |
分辨率 |
内容复杂度 |
收敛后 loss 参考范围 |
备注(模型结构) |
| MNIST |
28×28 |
低(手写数字) |
0.008~0.015 |
基础 U-Net(无注意力) |
| CIFAR-10 |
32×32 |
中(自然图像) |
0.015~0.03 |
U-Net + 部分注意力 |
| FFHQ-64 |
64×64 |
高(人脸) |
0.02~0.04 |
U-Net + 多尺度注意力 |
| FFHQ-256 |
256×256 |
高(人脸) |
0.03~0.06 |
U-Net+Transformer 注意力 |
| STL-10 |
96×96 |
中(自然场景) |
0.02~0.035 |
基础 U-Net + 残差块 |
2. 训练过程中的 loss 变化趋势
判断 loss 是否 “合适”,更重要的是观察变化趋势,而非绝对值:
初始阶段(前 10k 步):loss 快速下降,从初始的 0.05~0.1(取决于数据集)降至 0.02~0.04(以 CIFAR-10 为例);
收敛阶段(100k 步后):loss 趋于稳定,波动范围在 ±0.002 以内,无明显上升或下降趋势;
异常情况:若训练后期 loss 突然上升,可能是学习率过高、过拟合或数据加载错误;若 loss 长期(如 50k 步)停滞在较高值(如 CIFAR-10>0.04),可能是模型容量不足或噪声调度不合理。
四、如何判断 DDPM 的 loss 是否 “合适”?3 个核心判断标准
既然没有统一数值,开发者应通过 “趋势 + 对比 + 效果” 三维度判断 loss 是否合理,而非纠结于具体数值。
1. 标准 1:loss 趋势是否 “收敛稳定”
这是最基础的判断标准 —— 无论 loss 绝对值多少,只要满足 “持续下降后稳定”,就是合格的训练状态:
合格趋势:训练步数增加时,loss 逐步下降,最终在某一区间稳定(波动≤5%),例如 CIFAR-10 模型训练 200k 步后,loss 稳定在 0.02±0.001;
不合格趋势:
loss 持续下降但不收敛(如训练 500k 步仍在缓慢下降):可能是训练步数不足,或学习率过高导致无法稳定;
loss 下降后突然上升:需检查是否过拟合(训练集 loss 降但验证集 loss 升)、数据污染或模型参数异常;
loss 始终在高位波动(如 CIFAR-10>0.05 且无下降趋势):可能是模型结构不匹配(如用小模型训高分辨率数据)或噪声预测目标错误(如预测图像而非噪声)。
2. 标准 2:与基线对比是否 “合理”
通过对比 “相同设置下的开源基线” 或 “同团队的历史实验”,判断当前 loss 是否在合理范围:
开源基线对比:参考知名 DDPM 开源项目的 loss 报告,例如:
OpenAI 的 DDPM 在 CIFAR-10(32×32,T=1000,[-1,1] 归一化)的收敛 loss 约 0.018~0.022;
Hugging Face Diffusers 库中 CIFAR-10 的 DDPM 示例,收敛 loss 约 0.02~0.025;
若你的模型在相同设置下 loss 为 0.03~0.04,需排查是否模型结构简化、训练参数不当;若为 0.01~0.015,则可能优于基线(需结合生成效果验证)。
历史实验对比:若你曾用相同数据集训过不同模型,例如 “基础 U-Net loss 0.025,加注意力后 loss 0.018”,则新模型的 loss 应与同结构的历史结果一致,偏差过大需排查问题。
3. 标准 3:生成效果是否 “匹配 loss”
这是最关键的判断标准 ——loss 只是中间指标,最终需通过 “生成图像的视觉质量” 验证 loss 的有效性:
loss 低但生成差的情况:
现象:CIFAR-10 模型 loss 0.015(低于基线),但生成图像模糊、有块状 artifacts;
原因:可能是过拟合(训练集 loss 低但验证集 loss 高)、扩散过程的概率分布不匹配(如 β_t 调度错误)或采样时步长设置不当;
结论:此时 loss 虽低,但不合适,需优化模型泛化能力或采样策略。
loss 稍高但生成好的情况:
现象:CIFAR-10 模型 loss 0.025(略高于基线),但生成图像清晰、多样性好,FID(Fréchet Inception Distance,生成质量指标)低于基线;
原因:可能是模型更注重 “生成多样性” 而非 “噪声预测精度”,或 FID 对视觉质量的衡量比 MSE loss 更准确;
结论:此时 loss 虽稍高,但合适,无需刻意降低 loss。
生成效果的量化指标:除视觉观察外,可通过 FID、IS(Inception Score)等指标量化生成质量,若 FID 低(如 CIFAR-10 的 FID<10)、IS 高,即使 loss 稍高,也是合适的。
五、常见误区:关于 DDPM loss 的 4 个错误认知
开发者常因对 DDPM loss 的理解偏差,陷入 “盲目调参降 loss” 的误区,反而影响生成效果。
误区 1:“loss 越低越好”
错误逻辑:认为噪声预测误差越小,生成图像质量越高;
实际问题:过度追求低 loss 可能导致模型 “过拟合噪声”—— 记住训练集中的噪声模式,而非学习泛化的去噪能力,生成图像会缺乏多样性,甚至出现 “训练集图像的扭曲复制”;
正确做法:loss 降至基线范围即可,重点关注生成效果的多样性和清晰度,而非极致的低 loss。
误区 2:“不同框架的 loss 可直接对比”
错误做法:将 PyTorch 实现的 DDPM loss(如 0.02)与 TensorFlow 实现的 loss(如 0.04)直接对比,认为 PyTorch 模型更优;
实际差异:不同框架的 MSE 计算可能存在细微差异(如是否对通道维度平均、像素值精度),且数据加载、归一化逻辑可能不同;
正确做法:对比时需确保 “数据集、分辨率、归一化、模型结构、训练参数” 完全一致,仅框架不同时,loss 差异≤10% 可接受,无需纠结。
误区 3:“不看时间步分布,只看平均 loss”
错误做法:仅关注整体平均 loss,忽视不同时间步 t 的 loss 分布;
实际问题:若高 t(如 t=800~1000)的 loss 远高于低 t(如 t=100~200),可能是模型对 “高噪声图像” 的去噪能力不足,生成时后期去噪效果差,图像模糊;
正确做法:训练中记录 “各时间步的 loss 分布”,确保高 t 和低 t 的 loss 差异在合理范围(如高 t loss 是低 t 的 2~3 倍,而非 10 倍),若差异过大,需调整模型结构(如在高 t 层增加通道数)。
误区 4:“忽视验证集 loss,只看训练集 loss”
错误做法:仅监控训练集 loss,认为训练集 loss 收敛即可;
实际问题:DDPM 也会过拟合,训练集 loss 低但验证集 loss 高,生成时对 “未见过的图像分布” 泛化能力差,生成质量波动大;
正确做法:将数据集划分为训练集(90%)和验证集(10%),定期计算验证集的 loss,若验证集 loss 比训练集高 30% 以上,需加入正则化(如 Dropout、权重衰减)或增大数据集。
六、实操建议:如何优化 DDPM 的 loss 与生成效果?
若发现 loss 不合理(如过高、不收敛)或生成效果差,可按以下步骤优化:
1. 确认基础设置正确(避免低级错误)
检查噪声预测目标:确保模型输出的是 “噪声”,而非 “去噪后的图像”(新手常犯的错误,会导致 loss 异常高);
验证归一化方式:确认图像像素值是否按预期归一化(如 [-1,1]),若误将 [0,255] 的原始图像输入,loss 会高达 100+;
核对 β_t 调度表:确保前向扩散的 β_t 符合标准设置(如线性增长,β_1=1e-4,β_T=2e-2),错误的 β_t 会导致噪声强度异常,loss 无意义。
2. 调整模型与训练参数
模型容量匹配:高分辨率数据(如 256×256)需用大模型(如 U-Net+Transformer 注意力),小模型会导致 loss 居高不下;
学习率优化:初始学习率设为 1e-4(Adam 优化器),若 loss 波动大,降至 5e-5;若收敛慢,可在前期用 1e-4,后期用 1e-5 衰减;
增大 batch size:batch size 从 32 增至 64 或 128,梯度估计更准确,loss 波动减小,收敛更快(需确保显存足够);
启用 EMA:添加 EMA 更新(衰减系数 0.9999),EMA 模型的 loss 通常更稳定,生成效果更优。
3. 监控关键指标与可视化
记录多维度日志:除平均 loss 外,记录 “训练 / 验证集 loss”“各时间步 loss 分布”“FID/IS 指标”,便于定位问题;
定期可视化生成结果:每 10k 步采样 100 张图像,观察清晰度、多样性变化,若生成效果停滞,即使 loss 在降,也需调整模型;
绘制 loss 曲线:用 TensorBoard 或 Matplotlib 绘制 loss 趋势图,直观判断是否收敛,避免仅看数值而忽略趋势。
七、总结:DDPM loss 合适与否的核心逻辑
DDPM 的 loss 没有 “统一合适值”,但有 “科学判断逻辑”—— 核心是 “三个匹配”:
与训练趋势匹配:loss 持续下降后稳定,无异常波动或上升;
与基线设置匹配:在相同数据集、模型、参数下,loss 处于开源基线或历史实验的合理范围;
与生成效果匹配:loss 对应的生成图像清晰、多样,FID/IS 等量化指标达标。
对于开发者而言,无需纠结 “loss 是否降到 0.02 以下”,而应建立 “趋势 - 对比 - 效果” 的综合评估体系。记住:DDPM 的最终目标是生成高质量图像,loss 只是实现这一目标的 “指南针”,而非 “终点站”。
在实际训练中,建议先参考开源基线确定初始目标(如 CIFAR-10 的 loss 目标 0.02~0.025),训练中重点观察趋势与生成效果,若两者均达标,即使 loss 稍高或稍低,都是合适的;若不达标,再从设置、模型、参数入手排查,而非盲目追求数值降低。
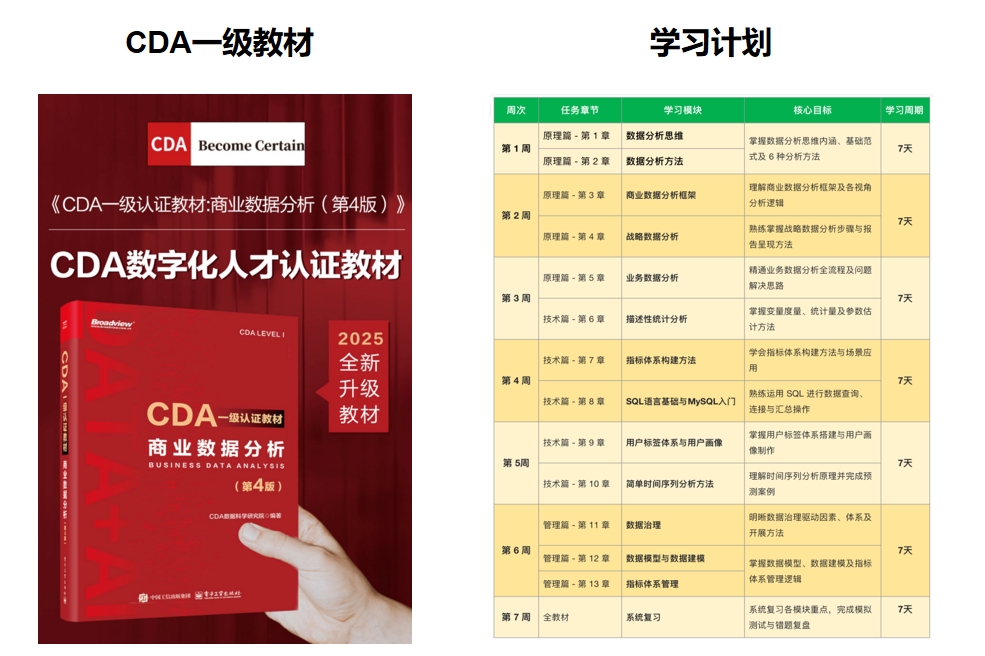
推荐学习书籍 《CDA一级教材》适合CDA一级考生备考,也适合业务及数据分析岗位的从业者提升自我。完整电子版已上线CDA网校,累计已有10万+在读~ !
CDA数据分析师考试相关入口一览(建议收藏):
▷ 想报名CDA认证考试,点击>>>
“CDA报名”
了解CDA考试详情;
▷ 想学习CDA考试教材,点击>>> “CDA教材” 了解CDA考试教材;
▷ 想加入CDA考试题库,点击>>> “CDA题库” 了解CDA考试题库;
▷ 想了解CDA考试含金量,点击>>> “CDA含金量” 了解CDA考试详情;
▷ 想了解CDA院校合作,点击>>> “院校合作” 了解咨询CDA院校合作;











 京公网安备 11010802034615号
经营许可证编号:京B2-20210330
京公网安备 11010802034615号
经营许可证编号:京B2-20210330